Automašīnai braucot,
pagriezienos un ceļa nelīdzenumos katrs ritenis veic dažādus ceļa garumus. Lai
riteņi neizslīdētu, tiem ir jāgriežas ar dažādiem ātrumiem. Arī piedziņas
riteņiem.
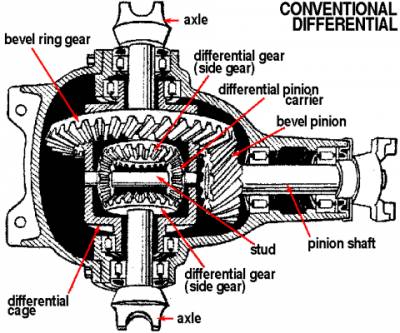
Diferenciālis – tas ir mehānisms, kas ļauj piedziņas ass riteņiem griezties
dažādos ātrumos un ar vienādu (vai dažādu) tiem pievadīto griezes momentu.
Automašīnu transmisijās ar vienu velkošo asi diferenciālis tiek uzstādīts starp
riteņu piedziņām (starpriteņu diferenciālis). Pilnpiedziņas automašīnās tas var
atrasties arī starp asīm (starpasu diferenciālis). Jauda uz riteni ir atkarīga
no tā rādiusa un pievadītā pie tā griezes momenta. Jaudas reizinājums ar riteņa
dinamisko rādiusu dod tieši to griezes momentu, kuru diferenciālim ir jānodod
uz riteņiem. Kad saķere ar ceļu ir nestabila vai viens no riteņiem ir
atslogots, griezes moments un jauda uz riteni ir ļoti maza vai nav vispār un
automašīna nevar turpināt kustību. Šī īpašība ir raksturīga diferenciāļiem ar
koniskajiem zobratiem un to sauc par simetrisko diferenciāli, jo tas griezes
momentu sadala vienādi starp riteņiem. Tas notiek tādēļ, ka satelīts strādā kā
balansēta svira un uz pusass zobratiem, tātad uz riteņiem, nodod tikai vienādu
spēku. Ja kādam no riteņiem ir slikta saķere ar ceļa segumu, tad efektīvais
griezes moments uz to ir niecīgs, attiecīgi, simetriskais diferenciālis uz otru
riteni pievadīs tikpat lielu spēku. Tātad, ja viens rietenis izslīd, tad tā
vilkme ir tuva nullei, tas pats uzreiz notiek ar otru riteni un kopsummā auto
vienkārši pazaudē visu jaudu.
Lai to uzlabotu, automašīnās
uzstāda pilnu vai daļēju diferenciālu bloķēšanu, kuras pakāpi nosaka bloķēšanas
koeficients. Bloķēšanas koeficients (Bk) – griezes momenta attiecība uz
atpaliekošo riteni pret griezes momentu uz apsteidzošo riteni. Simetriskajam
diferenciālim tas vienmēr ir 1, paaugstinātas berzes diferenciāļiem tas ir no 1
līdz 5. Jo lielāks Bk, jo labāka automašīnas caurbraucamība. Tātad sanāk, ka ja
Bk = 3, tad griezes moments uz atpaliekošā riteņa būs trīs reizes lielāks par
buksējošo, bet pie Bk = 5 – piecas reizes. Bet pieejamais griezes moments šajā
brīdī būs pieejams tikai no 20 – 70%, atkarībā no bloķējošā mehānisma īpašībām.
Ir vairāku veidu diferenciāļi (paaugstinātas berzes diferenciāļi)
1.Pilnās bloķēšanas diferenciālis
Pilnā starpasu diferenciāla bloķēšana. Pieslēdz vadītājs. Riteņu leņķu ātrumi
vienmēr ir vienādi, kas ir pretrunā ar automašīnas riņķa līnijas kustības
fiziku. Šāda diferenciāla bloķēšana noved pie riepu straujas nodilšanas un
stabilitātes zaudēšanas uz cietas virsmas.
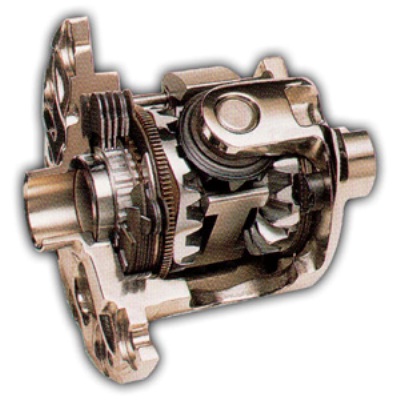
2.Daudzdisku diferenciālis
Tie ir simetriskie diferenciāļi, kuru konstrukcija iekļauj atsperotas berzes
disku atsperotās paketes. Tiem ir statiskā pārvilkšana (darba moments) no 2
līdz 12 kg/m. Tiek izmantots autosportā, ātri nodilst, ir nepieciešama
iejaukšanās pēc katrām sacīkstēm, lai atjaunotu mezgla darbspēju.
3.Viskomufta
Pilnībā hermētisks mezgls ar berzes diskiem, no kuriem vienam ir cieta
kinemātiskā sasaiste ar korpusu, citiem ar asīm. Diskiem ir atveres un kanāli,
lai palielinātu viskozo berzi. Tas viss iekšpusē ir piepildīts ar silikona
šķidrumu, kuram ir augsta viskozitāte un kurš piepilda korpusu par 80-90%.
Mezgls nav remontējams, jo šķidruma daudzums un viskozitāte arī nosaka
viskomuftas īpašības. Parādoties sūcei, visu mezglu ir nepieciešams nomainīt.
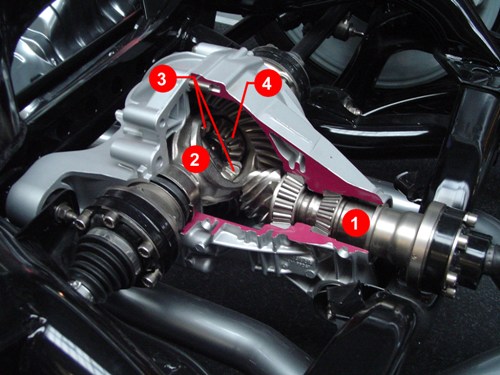
4.TORSEN
No angļu valodas «TORQUE»- griezes moments un «SENSING»- jūtīgs, tātad jūtīgs
pret griezes momentu. Šeit satelīti ir izvietoti korpusā perpendikulāri tā
asij, savienoti savā starpā pa pāriem ar tiešzobes sasaisti, bet ar pusass
zobratiem savienoti ar gliemeža tipa zobratiem. Pagriezienā pusass zobrats,
kurš ir saistīts ar atpaliekošo riteni, pagriež ar to kontaktā esošo satelītu,
un tas savukārt, griež otru satelītu un pusass zobratu. Šāda cietā kinemātiskā
sasaiste ļauj automašīnas riteņiem griezties ar dažādu ātrumu. Diferenciāla
bloķēšanu nodrošina berzes spēki, kas rodas gliemežzobrata sasaistē no griezes
momenta dažādības uz riteņiem. Konstrukcijas mīnusi – izgatavošanas
sarežģītība, agregāta uzstādīšana uz remonta kopumā dārgās izmaksas.
5.QUIFE
«Quife» konstrukcija ir reģistrēta kā tirdzniecības marka. Satelīti ir
izvietoti divās rindās paralēli korpusa griešanās asij. Pie tam tie stiprinās
nevis uz asīm, bet atrodas slēgtās no abām pusēm korpusa atverēs. Labā salelītu
rinda (to var būt no 3 līdz 5) ieiet saskarē ar labās pusass zobratu grupu,
kreisā – ar kreiso. Bez tam, satelīti no citām rindām saķeras viens ar otru.
Visiem zobratiem ir vītņzobi, viens un tas pats modulis un profila leņķis.
Satelītu un pusass zobratu zobu skaits ir savstarpēji saistīts jau mezgla
kopējā konstrukcijā. Kad viens no riteņiem sāk atpalikt, saistītais ar to
pusass zobrats sāk griezties lēnāk par diferenciāļa korpusu un griezt sev līdzi
saskarsmē esošo satelītu. Tas, savukārt, nodod kustību vidējam satelītam, kurš
jau atbild par pārējiem zobratiem. Tā tiek nodrošināti dažādi riteņu
apgriezieni pagriezienā.
Pateicoties dažādiem griezes momentiem uz riteņiem, vītņveida saķerē parādās
ass un radiālie spēki, kuri piespiež pusasu zobratus un satelītus pie korpusa
vai sadalītāja. Tādā veidā rodas berzes spēki, kuri nodrošina bloķēšanu, kas
palielina automašīnas jaudu un caurgājību. Bk indekss ir atkarīgs no zobratu
zobu slīpuma leņķa. Projektēšanas stadijā izmainot zobu slīpuma leņķi
(«spirāles leņķis»), mainās Bk atkarībā automašīnas īpašībām, ekspluatācijas
veida un paredzētās izmantošanas. Šāda tipa diferenciāļus visbiežāk izmanto
tjūningā.
Avots: http://bmwlife.lv |